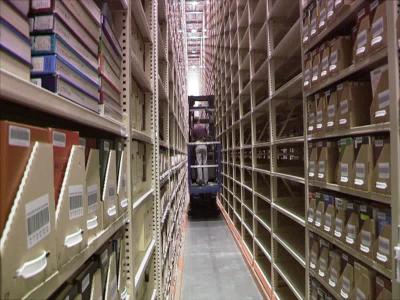
Faculty and Staff

This collection collates faculty and staff collections alphabetically by surname.
Filtering by
- Creators: Santello, Marco
In 2014/2015, Arizona State University (ASU) Libraries, the Labriola National American Indian Data Center, and the ASU American Indian Studies Department completed an ASU Institute for Humanities Research (IHR) seed grant entitled “Carlos Montezuma’s Wassaja Newsletter: Digitization, Access and Context” to digitize all ASU held issues of the newsletter Wassaja Freedom’s Signal for the Indian, which Yavapai activist-intellectual Carlos Montezuma, MD (1866-1923) self-published during 1916-1922. The grant team additionally selected a portion of the ASU Libraries Carlos Montezuma archival collection for digitization to provide a more complete picture of Dr. Carlos Montezuma’s life and work.
The ASU grant team produced a searchable online collection on the ASU Digital Repository and created an online exhibition in conjunction with the IHR Nexus Lab’s Developing Wassaja Project. The Nexus Lab’s role at ASU is to grow the digital humanities through interdisciplinary collaborations bringing together humanities, science, and technology. The Nexus Lab partnered with the grant team to create the Developing Wassaja Project which provided an opportunity for faculty, staff, and students at ASU to engage in electronic publication through web application development.
The resulting web platform, Wassaja: A Carlos Montezuma Project, provides context for this digitized collection and facilitates community interaction, including a partnership with Dr. Montezuma’s home community the Fort McDowell Yavapai Nation. In this webcast, Digital Projects Librarian Matthew Harp, Developing Wassaja Project team member Joe Buenker (subject librarian), and grant team member Joyce Martin (librarian and curator of the Labriola National American Indian Data Center) will discuss and demonstrate the resources created and the resulting partnership with the Fort McDowell Yavapai Nation. The webcast will focus on identifying collaborators and needed skills to engage in Digital Humanities research and on identifying the stages of a collaborative project.
Participants will gain insight on working directly with diverse communities; overcoming technical limitations of traditional institutional repositories; collaborative strategies with faculty, research centers, and cultural heritage societies; solutions for moving hidden collections into an engaging digital exhibition; integrating digital humanities research and instruction with library curation; and preparing for long term costs and management issues.
Anthropology librarian Juliann Couture and Joyce Martin, curator of the Labriola National American Indian Data Center, looking at the Center's display of unique Hopi Kachina dolls. Four of the kachinas (Navan Kachina; Talavi Kachina; Flute Kachina; and Ahöla Kachina) were created by artist, carver, and former ASU employee Tony Dukepoo as a gift to the libraries in 1979. The kachina dolls are on display in the Labriola Center located on the 2nd floor of the Hayden Library on ASU's Tempe campus.
The Simon Ortiz and Labriola Center Lecture on Indigenous Land, Culture, and Community addresses topics and issues across disciplines in the arts, humanities, sciences, and politics. Underscoring Indigenous American experiences and perspectives, this Series seeks to create and celebrate knowledge that evolves from an Indigenous worldview that is inclusive and that is applicable to all walks of life.” Professor Simon Ortiz discussed the overall nature of the Series, especially emphasizing the global nature of Indigenous concerns. Joyce Martin and Matthew Harp elaborated on the contributions of the Labriola National American Indian Data Center and ASU Libraries to the Series.
The Labriola Center hosts an informal event in Hayden Library which facilitates close interaction between the featured speaker and audience members. The ASU Libraries records the evening lectures which take place at the Heard Museum and presents both an audio podcast and streaming video of each lecture on the ASU Library Channel webpage. This lecture series provides not only a chance for community discussion at the events themselves, but through the innovative use of technology the ASU Libraries enables additional forums for discussion in blogs and web pages which choose to link to the streaming videos.

Myoelectric artificial limbs can significantly advance the state of the art in prosthetics, since they can be used to control mechatronic devices through muscular activity in a way that mimics how the subjects used to activate their muscles before limb loss. However, surveys indicate that dissatisfaction with the functionality of terminal devices underlies the widespread abandonment of prostheses. We believe that one key factor to improve acceptability of prosthetic devices is to attain human likeness of prosthesis movements, a goal which is being pursued by research on social and human–robot interactions. Therefore, to reduce early abandonment of terminal devices, we propose that controllers should be designed so as to ensure effective task accomplishment in a natural fashion. In this work, we have analyzed and compared the performance of three types of myoelectric controller algorithms based on surface electromyography to control an underactuated and multi-degrees of freedom prosthetic hand, the SoftHand Pro.
The goal of the present study was to identify the myoelectric algorithm that best mimics the native hand movements. As a preliminary step, we first quantified the repeatability of the SoftHand Pro finger movements and identified the electromyographic recording sites for able-bodied individuals with the highest signal-to-noise ratio from two pairs of muscles, i.e., flexor digitorum superficialis/extensor digitorum communis, and flexor carpi radialis/extensor carpi ulnaris. Able-bodied volunteers were then asked to execute reach-to-grasp movements, while electromyography signals were recorded from flexor digitorum superficialis/extensor digitorum communis as this was identified as the muscle pair characterized by high signal-to-noise ratio and intuitive control. Subsequently, we tested three myoelectric controllers that mapped electromyography signals to position of the SoftHand Pro. We found that a differential electromyography-to-position mapping ensured the highest coherence with hand movements. Our results represent a first step toward a more effective and intuitive control of myoelectric hand prostheses.

Introduction: Options currently available to individuals with upper limb loss range from prosthetic hands that can perform many movements, but require more cognitive effort to control, to simpler terminal devices with limited functional abilities. We attempted to address this issue by designing a myoelectric control system to modulate prosthetic hand posture and digit force distribution.
Methods: We recorded surface electromyographic (EMG) signals from five forearm muscles in eight able-bodied subjects while they modulated hand posture and the flexion force distribution of individual fingers. We used a support vector machine (SVM) and a random forest regression (RFR) to map EMG signal features to hand posture and individual digit forces, respectively. After training, subjects performed grasping tasks and hand gestures while a computer program computed and displayed online feedback of all digit forces, in which digits were flexed, and the magnitude of contact forces. We also used a commercially available prosthetic hand, the i-Limb (Touch Bionics), to provide a practical demonstration of the proposed approach’s ability to control hand posture and finger forces.
Results: Subjects could control hand pose and force distribution across the fingers during online testing. Decoding success rates ranged from 60% (index finger pointing) to 83–99% for 2-digit grasp and resting state, respectively. Subjects could also modulate finger force distribution.
Discussion: This work provides a proof of concept for the application of SVM and RFR for online control of hand posture and finger force distribution, respectively. Our approach has potential applications for enabling in-hand manipulation with a prosthetic hand.

The concept of postural synergies of the human hand has been shown to potentially reduce complexity in the neuromuscular control of grasping. By merging this concept with soft robotics approaches, a multi degrees of freedom soft-synergy prosthetic hand [SoftHand-Pro (SHP)] was created. The mechanical innovation of the SHP enables adaptive and robust functional grasps with simple and intuitive myoelectric control from only two surface electromyogram (sEMG) channels. However, the current myoelectric controller has very limited capability for fine control of grasp forces. We addressed this challenge by designing a hybrid-gain myoelectric controller that switches control gains based on the sensorimotor state of the SHP. This controller was tested against a conventional single-gain (SG) controller, as well as against native hand in able-bodied subjects. We used the following tasks to evaluate the performance of grasp force control: (1) pick and place objects with different size, weight, and fragility levels using power or precision grasp and (2) squeezing objects with different stiffness. Sensory feedback of the grasp forces was provided to the user through a non-invasive, mechanotactile haptic feedback device mounted on the upper arm. We demonstrated that the novel hybrid controller enabled superior task completion speed and fine force control over SG controller in object pick-and-place tasks. We also found that the performance of the hybrid controller qualitatively agrees with the performance of native human hands.

Biological and robotic grasp and manipulation are undeniably similar at the level of mechanical task performance. However, their underlying fundamental biological vs. engineering mechanisms are, by definition, dramatically different and can even be antithetical. Even our approach to each is diametrically opposite: inductive science for the study of biological systems vs. engineering synthesis for the design and construction of robotic systems. The past 20 years have seen several conceptual advances in both fields and the quest to unify them. Chief among them is the reluctant recognition that their underlying fundamental mechanisms may actually share limited common ground, while exhibiting many fundamental differences. This recognition is particularly liberating because it allows us to resolve and move beyond multiple paradoxes and contradictions that arose from the initial reasonable assumption of a large common ground. Here, we begin by introducing the perspective of neuromechanics, which emphasizes that real-world behavior emerges from the intimate interactions among the physical structure of the system, the mechanical requirements of a task, the feasible neural control actions to produce it, and the ability of the neuromuscular system to adapt through interactions with the environment. This allows us to articulate a succinct overview of a few salient conceptual paradoxes and contradictions regarding under-determined vs. over-determined mechanics, under- vs. over-actuated control, prescribed vs. emergent function, learning vs. implementation vs. adaptation, prescriptive vs. descriptive synergies, and optimal vs. habitual performance. We conclude by presenting open questions and suggesting directions for future research. We hope this frank and open-minded assessment of the state-of-the-art will encourage and guide these communities to continue to interact and make progress in these important areas at the interface of neuromechanics, neuroscience, rehabilitation and robotics.

Human physical interactions can be intrapersonal, e.g., manipulating an object bimanually, or interpersonal, e.g., transporting an object with another person. In both cases, one or two agents are required to coordinate their limbs to attain the task goal. We investigated the physical coordination of two hands during an object-balancing task performed either bimanually by one agent or jointly by two agents. The task consisted of a series of static (holding) and dynamic (moving) phases, initiated by auditory cues. We found that task performance of dyads was not affected by different pairings of dominant and non-dominant hands. However, the spatial configuration of the two agents (side-by-side vs. face-to-face) appears to play an important role, such that dyads performed better side-by-side than face-to-face. Furthermore, we demonstrated that only individuals with worse solo performance can benefit from interpersonal coordination through physical couplings, whereas the better individuals do not. The present work extends ongoing investigations on human-human physical interactions by providing new insights about factors that influence dyadic performance. Our findings could potentially impact several areas, including robotic-assisted therapies, sensorimotor learning and human performance augmentation.